 cabelo
cabeloVazamento do Claude Code: expõe meio milhão de linhas de IA
No dia 31 de março de 2026, um evento chamou a atenção da comunidade de engenharia de software e segurança: o suposto vazamento completo do código-fonte do Claude Code, CLI oficial da Anthropic.
Mas o mais curioso?
Não foi um ataque sofisticado.
Foi algo muito mais comum e perigoso: um source map publicado no npm.
O que aconteceu
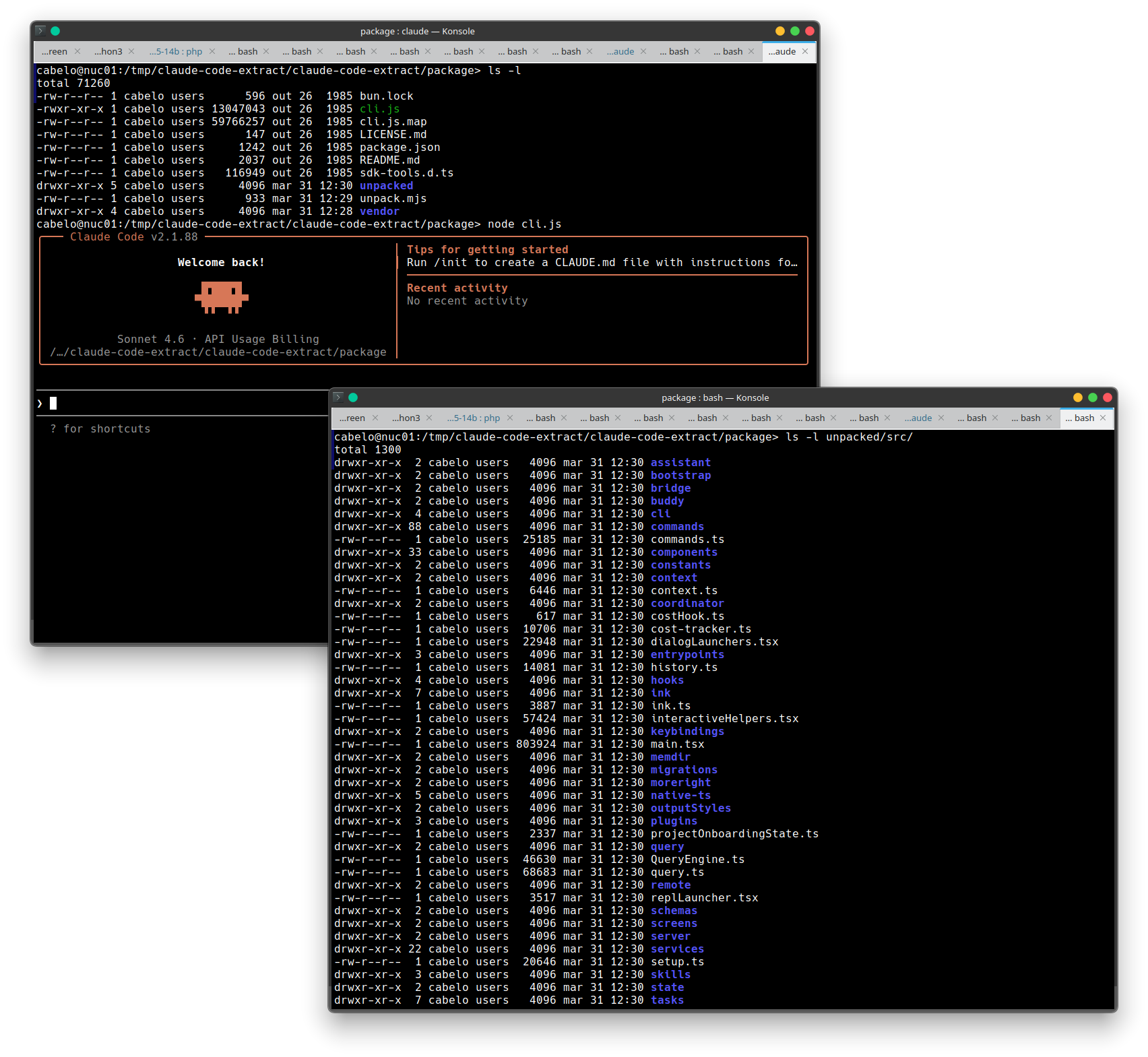
Um pesquisador de segurança identificou que o pacote @anthropic-ai/claude-code incluía um arquivo .map de aproximadamente 57 MB, contendo o código original completo da aplicação. Esse tipo de arquivo é usado normalmente para debug, mapeando código minificado de volta ao original mas, neste caso, ele continha todo o código em texto puro dentro da propriedade sourcesContent.
O resultado:
- ~1.900 arquivos
- 512.000+ linhas de código TypeScript
- Arquitetura completa de produção exposta
Ou seja: não foi um
leak parcial.
Foi o sistema inteiro.
O que existe dentro do Claude Code
O vazamento revelou algo muito mais interessante do que apenas código revelou como uma IA moderna de desenvolvimento realmente funciona por dentro.
 Arquitetura real (não marketing)
Arquitetura real (não marketing)
 Arquitetura real (não marketing)
Arquitetura real (não marketing)O Claude Code não é apenas um wrapper de chat. Ele é um sistema complexo com:
-
 Sistema de ferramentas (tool-based)
Sistema de ferramentas (tool-based)
Cada ação (ler arquivo, executar bash, buscar web) é um módulo isolado e com permissões. -
 Query Engine (~46k linhas)
Query Engine (~46k linhas)
Responsável por orquestrar chamadas ao modelo, cache, streaming e controle de execução. -
 Multi-agentes (“swarms”)
Multi-agentes (“swarms”)
Capacidade de criar agentes paralelos para resolver tarefas complexas. -
 Integração com IDEs
Integração com IDEs
Comunicação com VS Code e JetBrains via canais autenticados.
 Sistema de ferramentas (tool-based)
Sistema de ferramentas (tool-based) Query Engine (~46k linhas)
Query Engine (~46k linhas) Multi-agentes (“swarms”)
Multi-agentes (“swarms”) Integração com IDEs
Integração com IDEsTudo isso rodando sobre Bun + React (Ink) no terminal.
O que mais chamou atenção (e preocupa)
Esse tipo de vazamento não expõe só código ele expõe modelo mental e decisões de segurança.
Entre os pontos críticos identificados:
- System prompts e lógica interna de comportamento
- Modelo de permissões de ferramentas
- Proteções contra path traversal e acesso indevido
- Features beta não lançadas
- Estratégias de orquestração de agentes
Além disso, foram encontrados codenames internos como:
- KAIROS → modo persistente “always-on”
- Capybara → outro subsistema interno
- Flags de recursos como:
- contexto de 1 milhão de tokens
- “interleaved thinking”
- controle de esforço e modo rápido
A falha real: supply chain e build pipeline
O mais importante aqui não é o Claude. É o padrão. Esse incidente reforça um problema recorrente:
Falhas em pipelines de build e publicação são hoje uma das maiores superfícies de ataque.
O erro foi simples:
- O bundler gerou
.map - O
.npmignorenão excluiu - Nenhum pre-check validou o pacote antes do publish
Resultado: qualquer pessoa com npm pack tinha acesso ao código inteiro.
Insight estratégico (o que isso nos ensina)
Esse caso revela três coisas fundamentais sobre o futuro da IA:
1. IA moderna = sistemas complexos, não modelos isolados
O diferencial não está só no LLM está na orquestração.
2. Segurança de IA não é só prompt injection
É:
- supply chain
- permissões de ferramentas
- controle de execução
3. Transparência involuntária acelera aprendizado global
Mesmo sendo um incidente, ele oferece um “raio-x” de como sistemas state-of-the-art são construídos.
Conexão com o futuro (e com o que estamos construindo)
Se você trabalha com:
- sistemas multi-agente
- execução local/offline de IA
- orquestração de ferramentas
Esse vazamento praticamente confirma uma direção:
O futuro da IA está na integração entre modelo + sistema operacional + runtime de execução.
Algo muito próximo do que já vemos emergindo em iniciativas como:
- AI-native OS
- agentes autônomos
- computação heterogênea (CPU + GPU + NPU)
 Conclusão
Conclusão
 Conclusão
ConclusãoNão foi apenas um vazamento. Foi um lembrete.
Onde:
- segurança básica ainda falha
- sistemas de IA são mais complexos do que parecem
- e estamos apenas começando a entender como esses sistemas realmente funcionam
E talvez o ponto mais importante:
Quem dominar a arquitetura, não só o modelo vai dominar a próxima geração da IA.
VLM + CNN + Agentes: Como Resolver o “ECA Digital” no Linux sem Nuvem e preservando a privacidade do usuário.
Nos últimos dias, muito se discutiu muitas vezes com desinformação sobre a aplicação de conceitos do chamado “ECA Digital” (ou apelidado de “Lei Felca”) no ecossistema Linux. A narrativa dominante sugere restrições, controle excessivo ou até inviabilidade do uso de sistemas abertos.
E esse problema já tem solução.
É possível implementar mecanismos de proteção infantil diretamente no sistema operacional Linux, de forma 100% offline, sem coleta de dados e sem dependência de cloud, utilizando o estado da arte em Inteligência Artificial: VLMs (Vision-Language Models), redes neurais convolucionais (CNNs) e agentes inteligentes.
O Problema: Controle de Acesso por Idade no Linux
Ambientes Linux tradicionalmente utilizam autenticação baseada em senha, chave ou biometria simples. Porém, nenhum desses mecanismos responde a uma pergunta essencial no contexto do ECA Digital:
Quem está tentando obter privilégios administrativos é realmente um adulto autorizado?
Isso abre espaço para cenários comuns:
- Crianças tentando instalar software inadequado
- Uso indevido de credenciais dos pais
- Escalada de privilégio sem contexto de idade
A Solução: VLM + CNN com Agentes Inteligentes
A arquitetura proposta combina três componentes principais:
1. VLM (Vision-Language Model)
O VLM atua como camada semântica, interpretando a cena capturada pela câmera:
- Contexto do usuário diante do dispositivo
- Interação com prompts de validação
- Auxílio na inferência de idade com base visual
2. CNN (Redes Neurais Convolucionais)
As CNNs são responsáveis pela parte crítica:
- Detecção facial em tempo real
- Estimativa de idade (age estimation)
- Classificação etária (criança vs adulto)
Esse modelo é otimizado para execução local (edge), sem necessidade de GPU de alto custo.
3. Agentes de Decisão
Agentes inteligentes orquestram o fluxo:
- Validam se a ação requer privilégio root
- Disparam a análise visual
- Decidem permitir ou bloquear a operação
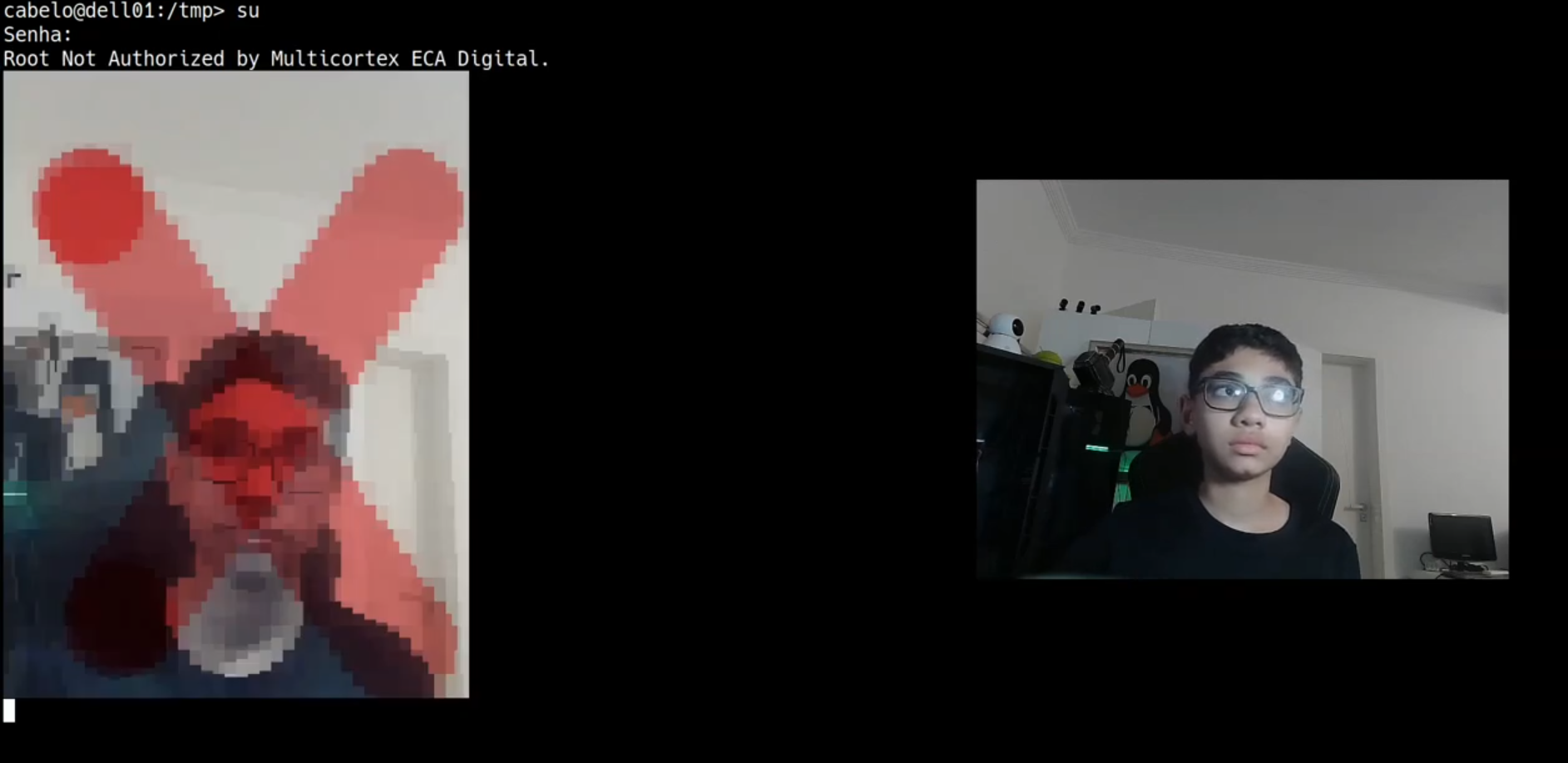
Teste de Vivacidade (Liveness Detection)
Um dos pontos mais importantes do sistema é evitar fraudes. Não basta detectar um rosto é necessário garantir que ele é real. O sistema impede ataques usando foto impressas e Vídeos doa pais.
Privacidade por Design: 100% Offline
Diferente de soluções comerciais, este modelo segue um princípio fundamental:
Nenhum dado é armazenado. Nenhuma imagem sai da máquina.
Características:
- Processamento local (edge computing)
- Sem envio para APIs externas
- Sem armazenamento de imagens ou embeddings
- Apenas decisão binária em tempo real (permitir/bloquear)
Isso elimina riscos de:
- Vazamento de dados
- Compliance com LGPD
- Dependência de serviços cloud
Integração Profunda com Linux via PAM
Toda essa inteligência não roda como um aplicativo isolado. Ela foi integrada diretamente ao sistema de autenticação do Linux através do PAM (Pluggable Authentication Modules).
Como funciona na prática:
- Usuário executa um comando com
sudoou tenta acesso root - O PAM intercepta a requisição
- O módulo customizado ativa o pipeline de IA
- A câmera captura o rosto do usuário
- O modelo CNN + VLM analisa idade e vivacidade
- O agente decide:
-
 Adulto → libera autenticação
Adulto → libera autenticação -
 Criança → bloqueia operação
Criança → bloqueia operação
-
 Adulto → libera autenticação
Adulto → libera autenticação Criança → bloqueia operação
Criança → bloqueia operaçãoTudo isso acontece antes da concessão de privilégios.
Vantagens dessa abordagem:
- Transparente para o usuário
- Integrado ao sistema operacional
- Funciona com qualquer aplicação que use PAM (sudo, login, ssh, etc.)
- Baixo impacto de performance
Impacto no Mercado: Linux Compatível com ECA Digital
Essa abordagem resolve diretamente o principal argumento usado contra o Linux em ambientes regulados:
“Linux não tem controle de acesso por idade”
Agora tem e de forma mais avançada que qualquer sistema tradicional.
Benefícios:
- Adequação ao conceito de ECA Digital
- Controle parental real, não apenas superficial
- Segurança sem invasão de privacidade
- Total soberania de dados (zero cloud)
Conclusão
O debate sobre restrições ao Linux baseado em desinformação ignora o avanço tecnológico disponível hoje.
Combinando:
- VLM
- CNN
- Agentes inteligentes
- Integração via PAM
é possível criar um sistema de controle de privilégios inteligente, privado e totalmente offline.
Isso não apenas resolve as preocupações do mercado como posiciona o Linux à frente, oferecendo uma solução mais segura, auditável e alinhada com princípios modernos de privacidade. Vejam o sistema funcionando abaixo:
Lei 15.211/2025, Linux e pânico digital: quando ninguém lê a lei e compartilham pânico.

A repercussão em torno da Lei 15.211/2025 mostrou, mais uma vez, como informação sem fundamento pode ser transformada em histeria coletiva quando quase ninguém se dá ao trabalho de ler o texto original da norma. No lugar da leitura, entrou o impulso por curtidas, engajamento e manchetes apocalípticas. O resultado foi previsível: uma onda de desinformação sobre uma suposta “proibição do Linux no Brasil”.
Nos últimos dias, recebi diversos e-mails e mensagens de pessoas preocupadas com a ideia de que a chamada “Lei Felca” abriria caminho para banir distribuições Linux no país. A narrativa se espalhou com velocidade impressionante, impulsionada principalmente por gente que jamais instalou, administrou ou sequer utilizou GNU/Linux de forma real no dia a dia, mas que se sentiu confortável para decretar o seu “fim” nas redes sociais.
O episódio ganhou ainda mais ruído em 17 de março, quando a distribuição Arch Linux 32 bloqueou o acesso a partir do Brasil. Para quem não conhece, trata-se de um projeto comunitário independente, um fork do Arch Linux tradicional, mantido para oferecer suporte a máquinas antigas com arquitetura de 32 bits (i686). A decisão desse projeto específico foi rapidamente tratada por muita gente como se fosse prova definitiva de que “o Linux havia sido bloqueado no Brasil”, o que evidentemente não corresponde aos fatos.
Falo disso com a tranquilidade de quem leva Linux a sério desde 1998, contribui com projetos open source e participa de palestras e iniciativas voltadas à comunidade. Para mim, usar Linux não é modismo, discurso de rede social ou bandeira ideológica de ocasião. É prática, trabalho árduo e convicção. Por isso, antes de repetir boatos, fui fazer o que quase ninguém fez: Buscar minimamente informações sobre a lei (Paulo Henrique Alkmin fez este trabalho).
A Lei nº 15.211, sancionada em setembro de 2025 e vigente a partir de 17 de março de 2026, institui o chamado Estatuto Digital da Criança e do Adolescente. O apelido “Lei Felca” surgiu em referência ao youtuber cujo vídeo sobre exploração infantil em redes sociais acelerou a tramitação do tema no Congresso. Até aí, tudo bem. O problema começou quando parte do debate público resolveu transformar uma leitura superficial em profecia técnica.
De fato, o Art. 1º estabelece que a lei se aplica a produtos e serviços de tecnologia da informação direcionados a crianças e adolescentes no país, ou com provável acesso por eles. Já o Art. 2º, inciso I, menciona exemplos como aplicações de internet, programas de computador, softwares, sistemas operacionais de terminais, lojas de aplicativos e jogos eletrônicos. Foi justamente a presença da expressão “sistemas operacionais” que bastou para disparar o pânico.
Mas o mais curioso é que a própria lei contém dispositivos que enfraquecem frontalmente a tese de que haveria espaço para uma proibição ampla de Linux ou qualquer outro sistema operacional (Obrigado novamente Paulo Henrique Alkmin ).
O primeiro ponto ignorado por quase todo mundo está no Art. 2º, § 2º, que exclui do escopo da lei as funcionalidades essenciais ao funcionamento da internet, incluindo protocolos e padrões técnicos abertos e comuns. Basta lembrar que o kernel Linux está presente em mais de 96% dos servidores web do mundo para perceber o tamanho do absurdo da narrativa criada. Estamos falando de uma base tecnológica central da infraestrutura global da internet, não de um aplicativo qualquer.
O segundo ponto relevante aparece no Art. 14, parágrafo único. Ali, a lei deixa claro que, independentemente das medidas adotadas por sistemas operacionais e lojas de aplicativos, os fornecedores das próprias aplicações devem implementar mecanismos para impedir o acesso indevido. Em outras palavras: a responsabilidade principal recai sobre a aplicação, não sobre o sistema operacional. Se uma rede social precisa adotar verificação etária, o dever primário é da plataforma. O sistema operacional pode até ter um papel complementar, mas não é o centro da obrigação.
O terceiro ponto, talvez o mais ignorado de todos, está no Art. 37, parágrafo único, que veda regulamentações que resultem em mecanismos de vigilância massiva, genérica ou indiscriminada, além de resguardar explicitamente direitos como liberdade de expressão e privacidade. Bloquear o uso de um sistema operacional inteiro como resposta regulatória seria, justamente, uma medida genérica, indiscriminada e incompatível com esse espírito.
Ou seja: bastariam três trechos da própria lei para desmontar a história do “Linux proibido”. Três dispositivos. No mesmo texto legal. Ainda assim, muita gente preferiu ignorá-los para manter viva a narrativa do caos.
A desinformação se espalhou em dois eixos ao mesmo tempo. De um lado, houve exploração política. De outro, houve um ruído técnico lamentável, inclusive entre pessoas da própria comunidade de tecnologia, que transformaram um “pode impactar discussões futuras” em “vai proibir o Linux”. É sempre mais fácil viralizar com uma frase catastrófica do que ler e interpretar os 37 artigos de uma lei.
Outro argumento que apareceu com frequência foi o de que o GNU/Linux “não teria mecanismos de controle parental” ou que seria incapaz de se adaptar a exigências legais voltadas à proteção de menores. Isso também revela desconhecimento técnico. O ecossistema Linux já dispõe de soluções concretas para esse tipo de necessidade. Há ferramentas como Malcontent, além de repositórios que exigem classificação etária de aplicativos com base no padrão OARS (Open Age Ratings Service). Também existem soluções como o Timekpr-nExT, que permite estabelecer limites diários, semanais e mensais de uso, e o CTparental, que oferece gestão de tempo e controle de conteúdo acessado ou baixado na internet.
Ou seja, além de a tese do “banimento” não se sustentar juridicamente, ela também fracassa tecnicamente. O GNU/Linux não é um ambiente sem recursos, sem governança ou sem capacidade de adaptação. Pelo contrário: justamente por ser aberto, auditável e colaborativo, ele frequentemente consegue responder com mais agilidade e transparência a desafios técnicos do que plataformas fechadas.
E digo mais: Se em algum momento surgisse uma exigência real para integração de verificação etária ou mecanismos complementares dentro do sistema operacional, a própria comunidade open source teria plena capacidade de responder.
Eu mesmo sozinho iria procurar a Serpro ou Gov.BR e implementaria integração com APIs com base de fé pública “e/ou privada” em módulos PAM, se necessário fosse. (exemplo vídeo abaixo). Agora imagine o que aconteceria se toda a comunidade resolvesse atacar o problema de forma coordenada. A chance de o resultado ser tecnicamente melhor do que o de plataformas proprietárias seria enorme.
No fim, esse episódio não fala apenas sobre Linux ou sobre a Lei 15.211/2025. Ele revela algo mais amplo e preocupante: a velocidade com que boatos se tornam “verdades” quando são emocionalmente convenientes. Em vez de leitura, contexto e análise, escolhe-se o pânico performático. Em vez de debate sério, produz-se barulho.
A lição é simples. Antes de decretar o fim do Linux, do software livre ou da internet como conhecemos, vale a pena fazer o básico: ler a lei. Porque, neste caso, o suposto escândalo nasceu muito menos do texto legal e muito mais da preguiça intelectual de quem preferiu acreditar na desinformação.
Use a FORÇA, Leia os fontes
e USE LINUX!
Lei 15.211/2025, Linux e pânico digital: quando ninguém lê a lei e compartilham notícias apocalípticas.
A repercussão em torno da Lei 15.211/2025 mostrou, mais uma vez, como informação sem fundamento pode ser transformada em histeria coletiva quando quase ninguém se dá ao trabalho de ler o texto original da norma. No lugar da leitura, entrou o impulso por curtidas, engajamento e manchetes apocalípticas. O resultado foi previsível: uma onda de desinformação sobre uma suposta “proibição do Linux no Brasil”.
Nos últimos dias, recebi diversos e-mails e mensagens de pessoas preocupadas com a ideia de que a chamada “Lei Felca” abriria caminho para banir distribuições Linux no país. A narrativa se espalhou com velocidade impressionante, impulsionada principalmente por gente que jamais instalou, administrou ou sequer utilizou GNU/Linux de forma real no dia a dia, mas que se sentiu confortável para decretar o seu “fim” nas redes sociais.
O episódio ganhou ainda mais ruído em 17 de março, quando a distribuição Arch Linux 32 bloqueou o acesso a partir do Brasil. Para quem não conhece, trata-se de um projeto comunitário independente, um fork do Arch Linux tradicional, mantido para oferecer suporte a máquinas antigas com arquitetura de 32 bits (i686). A decisão desse projeto específico foi rapidamente tratada por muita gente como se fosse prova definitiva de que “o Linux havia sido bloqueado no Brasil”, o que evidentemente não corresponde aos fatos.
Falo disso com a tranquilidade de quem leva Linux a sério desde 1998, contribui com projetos open source e participa de palestras e iniciativas voltadas à comunidade. Para mim, usar Linux não é modismo, discurso de rede social ou bandeira ideológica de ocasião. É prática, trabalho árduo e convicção. Por isso, antes de repetir boatos, fui fazer o que quase ninguém fez: Buscar minimamente informações sobre a lei (Paulo Henrique Alkmin fez este trabalho o que facilitou este post).
A Lei nº 15.211, sancionada em setembro de 2025 e vigente a partir de 17 de março de 2026, institui o chamado Estatuto Digital da Criança e do Adolescente. O apelido “Lei Felca” surgiu em referência ao youtuber cujo vídeo sobre exploração infantil em redes sociais acelerou a tramitação do tema no Congresso. Até aí, tudo bem. O problema começou quando parte do debate público resolveu transformar uma leitura superficial em profecia técnica.
De fato, o Art. 1º estabelece que a lei se aplica a produtos e serviços de tecnologia da informação direcionados a crianças e adolescentes no país, ou com provável acesso por eles. Já o Art. 2º, inciso I, menciona exemplos como aplicações de internet, programas de computador, softwares, sistemas operacionais de terminais, lojas de aplicativos e jogos eletrônicos. Foi justamente a presença da expressão “sistemas operacionais” que bastou para disparar o pânico.
Mas o mais curioso é que a própria lei contém dispositivos que enfraquecem frontalmente a tese de que haveria espaço para uma proibição ampla de Linux ou qualquer outro sistema operacional (Obrigado novamente Paulo Henrique Alkmin ).
O primeiro ponto ignorado por quase todo mundo está no Art. 2º, § 2º, que exclui do escopo da lei as funcionalidades essenciais ao funcionamento da internet, incluindo protocolos e padrões técnicos abertos e comuns. Basta lembrar que o kernel Linux está presente em mais de 96% dos servidores web do mundo para perceber o tamanho do absurdo da narrativa criada. Estamos falando de uma base tecnológica central da infraestrutura global da internet, não de um aplicativo qualquer.
O segundo ponto relevante aparece no Art. 14, parágrafo único. Ali, a lei deixa claro que, independentemente das medidas adotadas por sistemas operacionais e lojas de aplicativos, os fornecedores das próprias aplicações devem implementar mecanismos para impedir o acesso indevido. Em outras palavras: a responsabilidade principal recai sobre a aplicação, não sobre o sistema operacional. Se uma rede social precisa adotar verificação etária, o dever primário é da plataforma. O sistema operacional pode até ter um papel complementar, mas não é o centro da obrigação.
O terceiro ponto, talvez o mais ignorado de todos, está no Art. 37, parágrafo único, que veda regulamentações que resultem em mecanismos de vigilância massiva, genérica ou indiscriminada, além de resguardar explicitamente direitos como liberdade de expressão e privacidade. Bloquear o uso de um sistema operacional inteiro como resposta regulatória seria, justamente, uma medida genérica, indiscriminada e incompatível com esse espírito.
Ou seja: bastariam três trechos da própria lei para desmontar a história do “Linux proibido”. Três dispositivos. No mesmo texto legal. Ainda assim, muita gente preferiu ignorá-los para manter viva a narrativa do caos.
A desinformação se espalhou em dois eixos ao mesmo tempo. De um lado, houve exploração política. De outro, houve um ruído técnico lamentável, inclusive entre pessoas da própria comunidade de tecnologia, que transformaram um “pode impactar discussões futuras” em “vai proibir o Linux”. É sempre mais fácil viralizar com uma frase catastrófica do que ler e interpretar os 37 artigos de uma lei.
Outro argumento que apareceu com frequência foi o de que o GNU/Linux “não teria mecanismos de controle parental” ou que seria incapaz de se adaptar a exigências legais voltadas à proteção de menores. Isso também revela desconhecimento técnico. O ecossistema Linux já dispõe de soluções concretas para esse tipo de necessidade. Há ferramentas como Malcontent, além de repositórios que exigem classificação etária de aplicativos com base no padrão OARS (Open Age Ratings Service). Também existem soluções como o Timekpr-nExT, que permite estabelecer limites diários, semanais e mensais de uso, e o CTparental, que oferece gestão de tempo e controle de conteúdo acessado ou baixado na internet.
Ou seja, além de a tese do “banimento” não se sustentar juridicamente, ela também fracassa tecnicamente. O GNU/Linux não é um ambiente sem recursos, sem governança ou sem capacidade de adaptação. Pelo contrário: justamente por ser aberto, auditável e colaborativo, ele frequentemente consegue responder com mais agilidade e transparência a desafios técnicos do que plataformas fechadas.
E digo mais: Se em algum momento surgisse uma exigência real para integração de verificação etária ou mecanismos complementares dentro do sistema operacional, a própria comunidade open source teria plena capacidade de responder.
Eu mesmo sozinho iria procurar a Serpro ou Gov.BR e implementaria integração com APIs com base de fé pública “e/ou privada” em módulos PAM, se necessário fosse. (exemplo vídeo abaixo). Agora imagine o que aconteceria se toda a comunidade resolvesse atacar o problema de forma coordenada. A chance do resultado ser tecnicamente melhor comparado as plataformas proprietárias seria enorme.
No fim, esse episódio não fala apenas sobre Linux ou sobre a Lei 15.211/2025. Ele revela algo mais amplo e preocupante: a velocidade com que boatos se tornam “verdades” quando são emocionalmente convenientes. Em vez de leitura, contexto e análise, escolhe-se o pânico performático. Em vez de debate sério, produz-se barulho.
A lição é simples. Antes de decretar o fim do Linux, do software livre ou da internet como conhecemos, vale a pena fazer o básico: ler a lei. Porque, neste caso, o suposto escândalo nasceu muito menos do texto legal e muito mais da preguiça intelectual de quem preferiu acreditar na desinformação.
Use a FORÇA, Leia os fontes
e USE LINUX!
Granite 4.0 1B Speech: IA de voz compacta para o edge

Visão geral
Granite 4.0 1B Speech é o novo modelo de fala aberto da família Granite, da IBM, voltado para reconhecimento automatico de fala (ASR) e tradução automática de fala (AST) em múltiplos idiomas. Com cerca de 1 bilhão de parâmetros, ele foi desenhado para rodar em dispositivos com recursos limitados, mantendo desempenho competitivo frente a modelos bem maiores, inclusive em benchmarks públicos como o OpenASR.
O modelo é distribuído com pesos abertos, sob licença Apache 2.0, e já está integrado ao ecossistema de ferramentas como Hugging Face Transformers e vLLM, facilitando a adoção por desenvolvedores e empresas.
Principais capacidades
Granite 4.0 1B Speech é um modelo de linguagem de fala (“speech-language model”) capaz de:
- Reconhecimento automático de fala (ASR) em seis idiomas: inglês, francês, alemão, espanhol, português e japonês.
- Tradução automática de fala (AST) bidirecional entre esses idiomas e o inglês, além de pares adicionais como inglês–italiano e inglês–mandarim em cenário de fala-para-texto-para-texto.
- Processamento de entradas apenas de texto, reaproveitando o backbone Granite 4.0 1B como um modelo de linguagem tradicional quando não há áudio.
Além disso, a versão 4.0 introduz dois recursos bastante pedidos pela comunidade: suporte completo a ASR em japonês e “keyword list biasing”, que permite enviesar a decodificação para reconhecer melhor nomes próprios, siglas e termos específicos de domínio.
O que muda em relação ao Granite Speech 3.3
Granite 4.0 1B Speech sucede a linha Granite Speech 3.3, que incluía variantes de 2B e 8B parâmetros focadas principalmente em ASR em inglês e AST para alguns idiomas europeus e asiáticos. Enquanto o Granite Speech 3.3 8B já superava modelos abertos e fechados em tarefas de transcrição em inglês, ele exigia mais memória e poder computacional, o que limitava usos em cenários de edge ou dispositivos embarcados.
Na nova geração, a IBM reduz o número de parâmetros pela metade em relação ao granite-speech-3.3-2b, mantendo ou melhorando a acurácia em inglês e ampliando o suporte multilíngue. Isso é viabilizado por melhorias na arquitetura, na estratégia de alinhamento entre áudio e texto e no uso de técnicas de inferência como speculative decoding, que aceleram significativamente o tempo de resposta.
Arquitetura em alto nível
Granite 4.0 1B Speech segue a linha dos modelos Granite Speech anteriores: um encoder acústico especializado é acoplado a um modelo de linguagem de propósito geral (Granite 4.0 1B Base), alinhado para operar sobre embeddings de fala.
No encoder de áudio, a IBM utiliza 16 blocos Conformer treinados com CTC (Connectionist Temporal Classification) sobre um vocabulário de caracteres ASCII para idiomas europeus e um conjunto fonético de Katakana para japonês. Esse encoder incorpora block-attention com janelas de 4 segundos e self-conditioned CTC, reduzindo o custo computacional e melhorando a robustez em áudios longos.
Entre o encoder de fala e o LLM, há um adaptador de modalidade baseado em Windowed Query Transformer (Q-Former), responsável por reduzir a sequência temporal e projetar os embeddings acústicos para o espaço de embeddings de texto do Granite 4.0. O modelo de linguagem em si herda o backbone Granite 4.0 1B, que usa uma arquitetura híbrida Mamba‑2/Transformer, com foco em eficiência de memória e latência, além de oferecer contexto longo (até 128k tokens) em algumas variantes.
Desempenho em benchmarks
Apesar do tamanho relativamente pequeno, Granite 4.0 1B Speech alcançou a primeira posição no OpenASR Leaderboard, com word error rate (WER) médio em torno de 5,5%, superando modelos como Whisper Large V3, Phi-4 Multimodal e Canary 1B Flash. Esses resultados mostram que é possível combinar compacidade com alta qualidade de transcrição, algo especialmente relevante para aplicações em produção com custos de infra estrita.
Nos benchmarks de ASR em inglês, o modelo atinge WER competitivo ou superior em relação a sistemas com muito mais parâmetros, mantendo boa performance também em cenários multilíngues. Em AST, o modelo acompanha ou se aproxima de modelos maiores nos pares de idioma suportados, com destaque para traduções inglês–europeu e inglês–japonês/chinês.
Licença, governança e segurança
Assim como os demais modelos Granite 4.0, o 1B Speech é liberado sob licença Apache 2.0, o que permite uso comercial, modificações e redistribuição, desde que mantidos os avisos de copyright e licença. A IBM destaca que os modelos compactos seguem o mesmo padrão de governança, rastreabilidade de dados e certificações (incluindo conformidade com ISO 42001) adotado na família Granite maior.
Para deployments em produção, a recomendação é integrar o modelo com o Granite Guardian, camada de segurança e detecção de riscos que ajuda a mitigar abusos, vazamento de dados sensíveis e outros comportamentos indesejados. Isso é especialmente relevante em cenários regulados, como saúde, finanças e setor público, em que logs de áudio e transcrições podem conter informações altamente sensíveis.
Casos de uso típicos
Granite 4.0 1B Speech é particularmente atrativo para cenários de edge e aplicações empresariais que precisam de processamento de fala local.
Alguns exemplos de uso incluem:
- Contact centers e voicebots corporativos, com reconhecimento de fala em tempo real em múltiplos idiomas e opção de tradução on-the-fly para agentes humanos.
- Sistemas embarcados em veículos, equipamentos industriais ou dispositivos IoT, onde a comunicação por voz precisa funcionar mesmo com conectividade limitada.
- Ferramentas de produtividade, como assistentes pessoais, sistemas de tomada de notas em reuniões e legendagem automática, com possibilidade de rodar localmente em notebooks potentes ou estações de trabalho.
- Aplicações multilíngues em ambientes regulados, que exigem maior controle sobre dados de áudio e transcrições, evitando o envio de informações para serviços externos proprietários.
No contexto de desenvolvimento de agentes e pipelines RAG, o modelo também pode atuar como front-end de voz para um LLM de texto maior, convertendo áudio em texto que depois será enriquecido com contexto externo e respondido de volta ao usuário, possivelmente com síntese de voz em outro componente.
Como experimentar o modelo
O Granite 4.0 1B Speech está disponível no Hugging Face sob o identificador ibm-granite/granite-4.0-1b-speech, com documentação detalhada, exemplos de uso e instruções de inferência via Transformers e vLLM.
Um exemplo simplificado de uso com vLLM demonstra como carregar o modelo, aplicar o template de chat e enviar um áudio junto com a instrução para obter a transcrição:
from transformers import AutoTokenizer
from vllm import LLM, SamplingParams
from vllm.assets.audio import AudioAsset
model_id = "ibm-granite/granite-4.0-1b-speech"
tokenizer = AutoTokenizer.from_pretrained(model_id)
def get_prompt(question: str, has_audio: bool):
if has_audio:
question = f"<|audio|>{question}"
chat = [{"role": "user", "content": question}]
return tokenizer.apply_chat_template(chat, tokenize=False)
model = LLM(
model=model_id,
max_model_len=2048,
limit_mm_per_prompt={"audio": 1},
)
question = "can you transcribe the speech into a written format?"
prompt_with_audio = get_prompt(question=question, has_audio=True)
audio = AudioAsset("mary_had_lamb").audio_and_sample_rate
inputs = {"prompt": prompt_with_audio, "multi_modal_data": {"audio": audio}}
outputs = model.generate(
inputs,
sampling_params=SamplingParams(temperature=0.2, max_tokens=64),
)
print(outputs[0].outputs[0].text)
Além da integração com vLLM, o modelo pode ser consumido via API ou contêineres preparados por parceiros e pela própria IBM, seguindo a mesma lógica de outros modelos Granite 4.0.
Por que o Granite 4.0 1B Speech é relevante
A combinação de abertura de pesos, licença permissiva, eficiência computacional e desempenho de ponta em benchmarks públicos torna o Granite 4.0 1B Speech um candidato natural para empresas que querem construir soluções de voz sem ficarem presas a serviços proprietários. O fato de o modelo liderar rankings como o OpenASR, mesmo com apenas 1 bilhão de parâmetros, mostra que há espaço para arquiteturas mais enxutas competirem com gigantes em tarefas de ASR e AST.
Para times de engenharia, isso se traduz em custos menores de GPU/CPU, possibilidade de deployment on-premises ou no edge e mais controle sobre toda a cadeia de dados de áudio.
Para a comunidade, é mais um passo na direção de um ecossistema de IA de voz verdadeiramente aberto, no qual modelos de fala de alta qualidade podem ser auditados, adaptados e combinados com outras peças (TTS, LLMs de texto, agentes) sem barreiras artificiais.
Até o próximo post.
OWASP SP disponibiliza ModSecurity (CRS) para openSUSE.

Hoje dia 09 de Março de 2026 às 14h30, uma hora a após lançar a versão 4.21.1 do OWASP CRS, o Capítulo SP disponibilizou esta versão para todas as versões da plataforma openSUSE LINUX. Isto demonstra o nosso compromisso com a evangelização e colaboração com a comunidade de desenvolvedores de Software Livre.
OWASP CRS é um conjunto de regras genéricas de detecção de ataques para uso com o ModSecurity ou firewalls de aplicações web compatíveis. O CRS visa proteger aplicações web contra uma ampla gama de ataques, incluindo os dez principais da OWASP, com um mínimo de falsos positivos.
OWASP Core Rule Set 4.24.1: Atualização das regras de proteção para WAF
Foi disponibilizada a nova versão 4.24.1 do OWASP Core Rule Set (CRS), um dos conjuntos de regras mais utilizados no mundo para Web Application Firewalls (WAF), especialmente com ModSecurity e outros motores compatíveis. O CRS fornece um conjunto de regras genéricas para detectar e bloquear ataques comuns contra aplicações web, incluindo vulnerabilidades presentes no OWASP Top 10, como SQL Injection, XSS e File Inclusion. Essa atualização faz parte da série 4.x, que recebe melhorias contínuas focadas principalmente em novas detecções de ataques, redução de falsos positivos e ajustes internos nas regras, mantendo compatibilidade com os principais motores de WAF.
Principais melhorias desta versão
A versão 4.24.1 traz um conjunto de refinamentos importantes no ruleset:
1. Correções e estabilidade das regras
Foram aplicadas correções em regras existentes para evitar comportamentos inesperados ou falhas de detecção. Isso inclui ajustes em expressões regulares, lógica de validação e melhorias no processamento das requisições HTTP.
2. Redução de falsos positivos (false positives)
Um dos focos constantes do projeto CRS é reduzir bloqueios indevidos. Nesta atualização foram feitos refinamentos em diversas regras para evitar que tráfego legítimo seja interpretado como ataque.
3. Melhorias nas detecções de ataques web
A atualização inclui aprimoramentos em regras relacionadas a categorias de ataques comuns como:
- SQL Injection (SQLi)
- Cross-Site Scripting (XSS)
- Remote Code Execution (RCE)
- exploração de headers HTTP
- evasão de filtros em payloads
Essas melhorias aumentam a capacidade do WAF de identificar técnicas modernas de evasão utilizadas por atacantes.
4. Manutenção e limpeza do ruleset
Também foram incluídas melhorias de manutenção do projeto, como ajustes em scripts, testes e organização interna das regras, facilitando o desenvolvimento e a evolução futura do CRS.
Por que atualizar?
O OWASP CRS é a primeira linha de defesa contra ataques a aplicações web quando utilizado com um WAF. Atualizações frequentes são importantes porque:
- novos vetores de ataque surgem constantemente
- técnicas de bypass evoluem rapidamente
- correções de falsos positivos melhoram a operação em produção
A série 4.24.x está entre as versões oficialmente suportadas pelo projeto, o que significa que continuará recebendo atualizações de segurança e correções.
Conclusão
A versão 4.24.1 do OWASP Core Rule Set é uma atualização incremental focada em estabilidade, melhoria de detecção e redução de falsos positivos, mantendo o ruleset alinhado com as técnicas modernas de ataque à web.
Para ambientes que utilizam ModSecurity, Nginx, Apache ou outros WAFs compatíveis, manter o CRS atualizado é essencial para garantir proteção eficaz contra ameaças emergentes.
Mais informações, download e outros:
https://build.opensuse.org/package/show/home:cabelo:innovators/owasp-modsecurity-crs
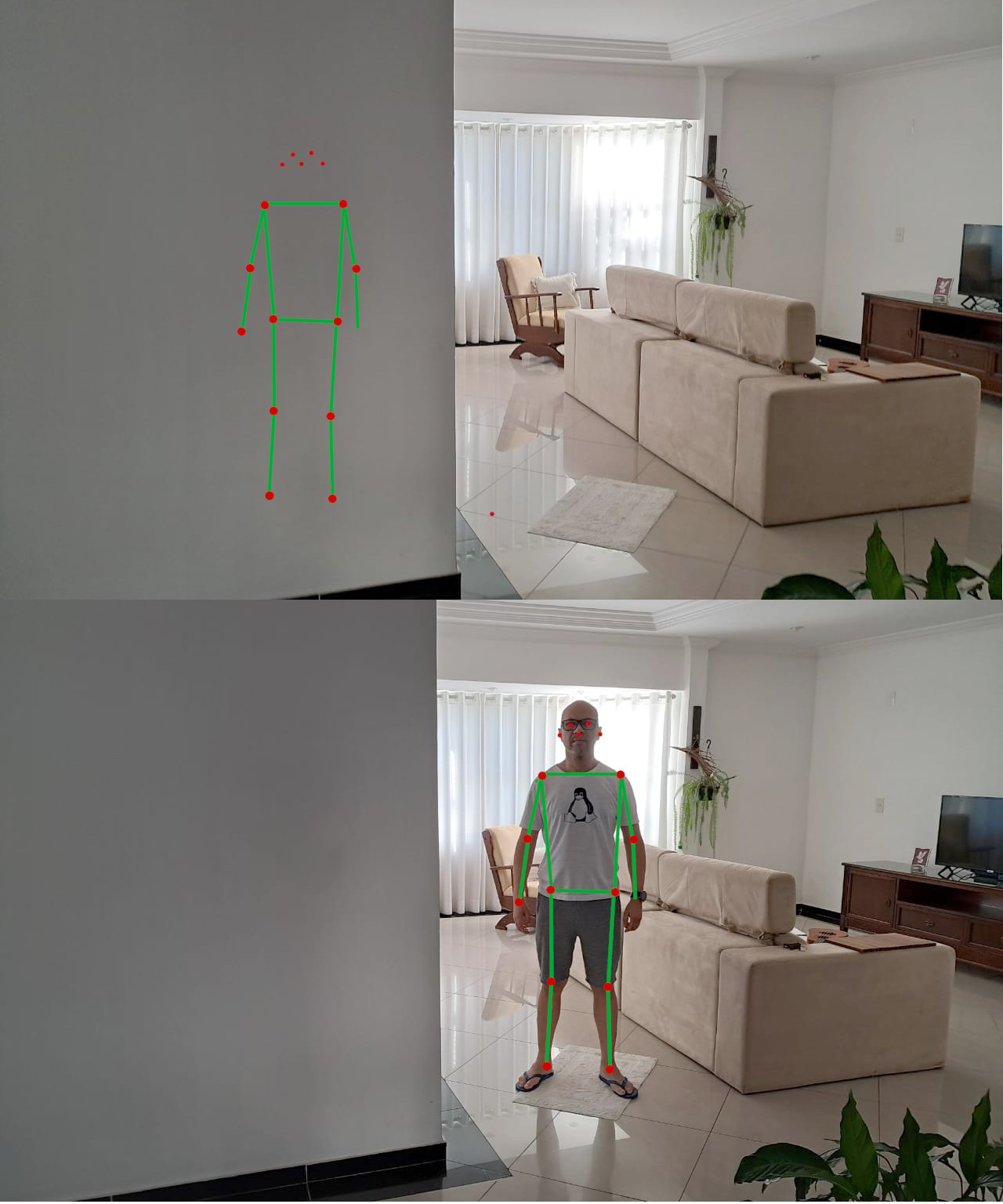
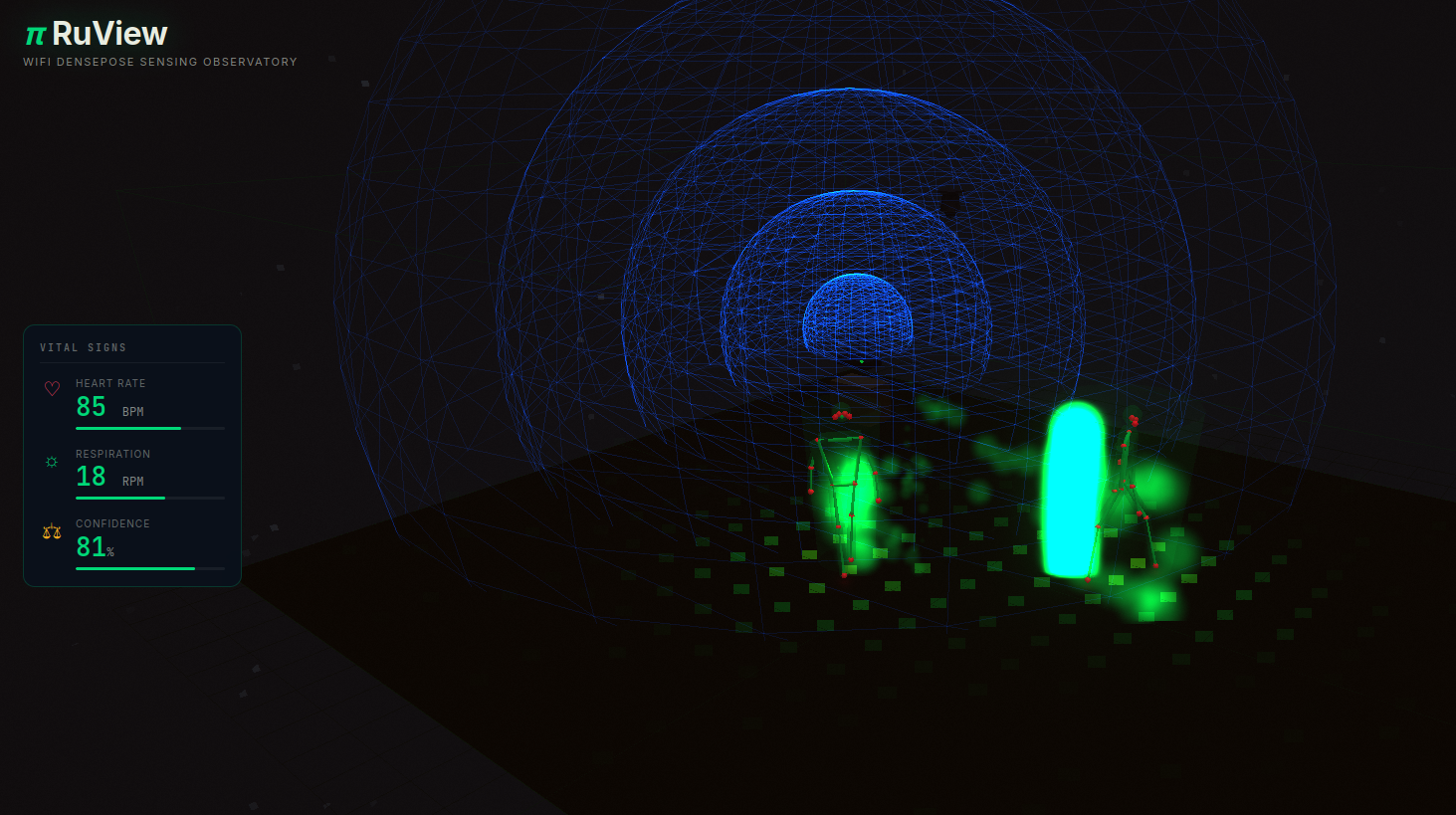
Enxergar pessoas através das paredes com Wi-Fi – π RuView: WiFi DensePose
O projeto RuView (tambem chamado de WiFi DensePose) é daqueles projetos que parecem ficção científica e bruxaria: ele estima pose humana, presença e até sinais vitais usando apenas ondas de rádio do Wi-Fi, sem capturar um único pixel de vídeo, ou seja somente Wifi.
O que é o RuView, em uma frase?
O RuView é um sistema open source que analisa perturbações no CSI (Channel State Information) do Wi-Fi para reconstruir, em tempo real, pose humana (skeleton/DensePose), presença e métricas de respiração/batimentos com foco forte em privacidade, porque não usa câmeras.
Por que “CSI” importa (e por que seu notebook comum não faz tudo)
Aqui está o pulo do gato:
- RSSI (o que Wi-Fi comum costuma expor) é basicamente “um número por AP” (força do sinal). Serve para presença/movimento de forma bem mais grossa.
- CSI expõe informações ricas por subportadora (amplitude/fase), permitindo extrair padrões finos do ambiente e do movimento.
O próprio projeto deixa claro: pose/vitais/through-wall dependem de CSI; em laptops comuns você tende a ficar no máximo em presença/movimento via RSSI.
O que ele consegue detectar hoje
O “cardápio” técnico do projeto:
- Pose estimation: CSI (amplitude/fase por subportadora) → DensePose UV maps / skeleton
- Respiração: bandpass ~0,1–0,5 Hz → pico por FFT (faixa típica 6–30 BPM)
- Batimentos: bandpass ~0,8–2,0 Hz → pico por FFT (faixa típica 40–120 bpm)
- Presença: variação de RSSI + energia de banda de movimento com latência muito baixa
-
Through-wall sensing: usando geometria de zona de Fresnel + multipath (o README menciona “até ~5m” em certos cenários)
E tem um detalhe importante de responsabilidade: a estimativa de sinais vitais no firmware alpha é heurística e “não é para uso médico” melhor com pessoa parada e ambiente controlado.
O projeto esta disponível nos seguintes hardware:
- ESP32-S3 (recomendado) para capturar CSI e montar uma malha (mesh) de sensores; o README cita cenários com ESP32-S3 “~$8” como add-on por zona.
- NICs de pesquisa (ex.: Intel 5300 / Atheros AR9580) com drivers/patches para CSI no Linux.
- Sem hardware: dá para brincar o pipeline com execução determinística/“proof replay”. Além disso, o projeto mostra uma linha interessante para edge AI: um modelo/embedding de “fingerprint” do ambiente com ~55 KB total, cabendo na memória do ESP32, com backbone + head + MicroLoRA por ambiente.
Arquitetura: do rádio ao 3D
- O RuView não é só “um script”; ele é um sistema completo:
- Captura e streaming (ESP32-S3): captura CSI em frequência definida e pode enviar bruto por UDP para um servidor.
- Processamento e API (Rust): o “sensing server” expõe REST API e WebSocket para frames/vitais/pose e integra com UI.
- Visualização (Observatory/Three.js): um modo “Observatory” para ver cenários (multi-person, fall detect, intrusion, etc.) e animações em 3D.
O projeto também enfatiza performance com um rewrite em Rust, citando pipeline completo em ordem de dezenas de microssegundos por frame e um comparativo de speedup vs Python.
Primeiros passos em 30 segundos (sem instalar ferramentas compiladas localmente)
O caminho mais simples é via Docker:
docker pull ruvnet/wifi-densepose:latest
docker run -p 3000:3000 -p 3001:3001 -p 5005:5005/udp ruvnet/wifi-densepose:latest
# depois abra http://localhost:3000
Abaixo as URL da API:
curl http://localhost:3000/health
curl http://localhost:3000/api/v1/vital-signs
curl http://localhost:3000/api/v1/pose/current
Verificação “científica”: pipeline determinístico (sem Wi-Fi real)
Um pedaço que eu achei muito bem pensado: o projeto oferece um modo “verify” para confirmar que o pipeline de sinal é real e reproduzível sem hardware, sem GPU, sem Docker. Para isto basta usar o comando ./verify
Ele roda checagem de ambiente, replay de um sinal de referência por toda a cadeia (filtragem, janelamento, FFT/Doppler etc.) e compara um hash SHA-256 do resultado.
Edge Intelligence no ESP32: do “raw streaming” ao “standalone”
O RuView também descreve “tiers” de processamento no próprio ESP32-S3:
- Tier 0: só streaming bruto (raw CSI)
- Tier 1: limpeza + estatística + seleção de subportadoras + compressão
- Tier 2: Tier 1 + presença + vitais + motion scoring + fall detection
- (No README do github, também aparece um tier com módulos WASM, para extensões customizadas)
A ideia é reduzir banda e permitir detecção local sem PC/servidor, dependendo do tier configurado.
Casos de uso que fazem sentido (e por que isso chama tanta atenção)
Quando você junta “funciona no escuro”, “não precisa line-of-sight” e “sem câmera”, começa a aparecer uma lista enorme de aplicações. Por exemplo, como monitoramento de idosos (quedas/sono), segurança perimetral, ambientes industriais e robótica, entre outros. A parte legal aqui é que não é só “conceito”: o projeto também discute limitações físicas (subportadoras, multipath, atenuação por metal) e escalabilidade por múltiplos APs/nós.
Privacidade: “sem câmera” não significa “sem dado sensível”
Mesmo sendo privacy-first (sem imagem/vídeo), o próprio user guide lembra que posição, movimento e sinais vitais ainda são dados pessoais e podem cair em regulações dependendo do contexto.
RESUMO: RuView é um daqueles projetos que redefinem o que a gente entende por “sensor”: em vez de adicionar mais uma câmera ao mundo, ele tenta extrair informação do que já está no ar ondas de rádio. E mesmo que você não vá colocar isso em produção amanhã, só o fato de ter:
- pipeline verificável (hash),
- stack completa (edge → API → UI),
- e documentação extensa,
já torna o repositório um prato cheio para quem pesquisa IA aplicada, sistemas embarcados e computação “ambiental”.
Créditos: ruvnet
Fonte: https://github.com/ruvnet/RuView
LingBot-World: Geração de mundo “jogável” opensource.
Imagine assistir a um vídeo gerado por IA. Agora, imagine que você pode colocar as mãos no teclado e controlar para onde a câmera vai, em tempo real, enquanto o mundo é criado à sua frente. Isso não é mais ficção científica distante: conheça o LingBot-World.
Recém-lançado, o framework apresenta o primeiro modelo de mundo de alta capacidade totalmente open source, estabelecendo um contraste direto com soluções proprietárias como o Genie 3.
Embora ambos ofereçam interatividade em tempo real, o LingBot-World se destaca no chamado grau dinâmico, ou seja, demonstra maior fidelidade ao lidar com física complexa e transições de cena. O sistema atinge 16 quadros por segundo e conta com memória espacial emergente, mantendo a consistência dos objetos mesmo após ficarem até 60 segundos fora do campo de visão.
Na prática, esse lançamento rompe o monopólio na simulação de mundos interativos, ao disponibilizar para a comunidade não apenas o código-fonte, mas também os pesos completos do modelo.
O “Teste que executei” demonstra isso perfeitamente. no video deste post.
Ele chega a simular dinâmicas que não estão visíveis na cena. Se um veículo sai do enquadramento, o modelo continua calculando sua trajetória fora da tela. Quando a câmera retorna, o carro reaparece na posição matematicamente coerente, em vez de simplesmente sumir ou ficar congelado. Isso indica uma mudança profunda: deixamos de ter modelos que apenas “imaginam” imagens e passamos a ter sistemas que efetivamente simulam leis físicas.
Publicado em 28 de janeiro de 2026, o artigo “Advancing Open Source World Models” introduziu este novo simulador que promete abalar as estruturas da IA generativa e do desenvolvimento de jogos. Diferente de tudo o que vimos até agora, o LingBot-World não apenas cria vídeos; ele simula ambientes interativos com física consistente e latência abaixo de um segundo
O Que Faz o LingBot-World Ser Diferente?
A maioria dos modelos de vídeo atuais (como o Gen3 ou Matrix GAN 2.0) funciona de forma passiva: você digita um texto e espera o vídeo ficar pronto. O LingBot-World muda esse paradigma ao permitir que o usuário dirija a câmera através das cenas usando as teclas W, A, S e D.
Seja explorando castelos góticos com dragões, interiores realistas ou mundos com estética de anime e pintura a óleo, o modelo responde aos seus comandos instantaneamente.
Por Baixo do Capô: Como a Mágica Acontece
Para os entusiastas técnicos e desenvolvedores, a arquitetura do LingBot-World é fascinante. O modelo de 14 bilhões de parâmetros (cujos pesos estão disponíveis no Hugging Face) utiliza um pipeline de treinamento em três estágios,
- Pré-treinamento: Estabelece uma base sólida de vídeo para entender texturas.
- Treinamento Intermediário (Física): Aqui o modelo aprende “conhecimento de mundo”. A equipe usou a Unreal Engine para gerar dados sintéticos onde as ações do usuário e os estados da câmera foram gravados em sincronia com o vídeo
- .Pós-treinamento (Baixa Latência): O segredo da interatividade. Usando técnicas como “destilação latente”, eles reduziram os passos computacionais para garantir que a simulação rode suavemente em tempo real.
O sistema usa um componente chamado codificador “Plucker”, que transforma seus comandos de teclado (WASD) em embeddings geométricos. Esses dados ajustam as características do vídeo através de uma camada de ação, direcionando a geração quadro a quadro
Open Source vs. O Resto
Enquanto concorrentes de peso como o Mirage 2 e o Genie 3 mantêm seus códigos fechados, o LingBot-World é totalmente Open Source
E ele não sacrifica qualidade por ser aberto. Nos benchmarks (Versus Bench), ele alcançou uma pontuação de quase 0,89 em grau dinâmico (movimento complexo), superando significativamente concorrentes como o Ume 1.5 e o HY World 1.5, que ficam em torno de 0,76. Ele consegue manter essa física complexa de forma consistente por longas durações (mais de um minuto)
Conclusão
O LingBot-World representa um passo gigante na transformação da geração de vídeo passiva em simulação interativa
Com o código disponível no GitHub, ele abre portas para acelerar o progresso no desenvolvimento de jogos e na IA corporificada, colocando o poder de criar mundos infinitos e controláveis nas mãos de qualquer desenvolvedor.
Se você quer testar, o código e os exemplos de inferência já estão disponíveis para quem quiser mergulhar na próxima geração de simuladores de mundo.
Código Fonte:
https://github.com/Robbyant/lingbot-world
Software Livre pode mudar o mundo da IA Musical da Noite para o dia.
Estamos vivendo em uma era onde a inovação tecnológica não obedece a limites de velocidade. Da noite para o dia, fomos apresentados a plataformas fantásticas e revolucionárias de geração de música com Inteligência Artificial, como o Suno. No entanto, vivemos em um mundo onde essas soluções comerciais gigantescas podem ser rapidamente ameaçadas por tecnologias livres e de código aberto.
O foco aqui não é comparar a qualidade de plataformas comerciais com as gratuitas, mas sim observar a velocidade absurda das mudanças. O que antes exigia datacenters na nuvem e assinaturas mensais pagas, agora pode rodar no conforto do seu próprio computador, de forma totalmente gratuita e sem restrições.
Para colocar essa realidade à prova, fiz um teste prático: gerei uma música completa sobre a “ABRIA” em apenas 10 segundos, utilizando uma placa de vídeo (GPU) de 16GB. Isso é possível porque as novas tecnologias de código aberto trazem a geração de áudio de nível comercial diretamente para o hardware de consumo.
Para entender como isso funciona, precisamos dividir a mágica em duas partes principais: o motor (backend) e a interface (frontend).
A Arquitetura: Separando o Cérebro da Interface
A geração local de músicas em alta velocidade só é possível graças à união de dois projetos de código aberto distintos, mas que trabalham em perfeita harmonia:
1. O Motor (Backend) – ACE-Step-1.5: Este é o verdadeiro “cérebro” da operação. O ACE-Step 1.5 é um modelo fundacional de música altamente eficiente que processa as descrições e estilos fornecidos para gerar as faixas de áudio. Ele foi desenhado para rodar localmente e entrega uma performance impressionante, conseguindo compor faixas inteiras em uma questão de segundos em GPUs modernas.
2. A Interface (Frontend) – ACE-Step UI: Interagir com inteligência artificial apenas por linhas de código pode ser frustrante. É aqui que entra o ACE-Step UI. Ele funciona como o “rosto” do projeto, entregando uma interface profissional, limpa e inspirada no Spotify. O frontend foi construído para que você possa controlar os parâmetros da música, gerenciar sua biblioteca e ver o progresso da geração de forma visual e intuitiva.
Guia Prático: Como Rodar Essa Tecnologia Localmente
A instalação pode parecer assustadora para quem não está acostumado com terminais, mas o processo foi incrivelmente simplificado. Veja como você pode configurar o seu próprio estúdio de IA musical local passo a passo.
Download da Interface Primeiro, vamos clonar o repositório do frontend e tentar iniciá-lo:
git clone https://github.com/fspecii/ace-step-ui
cd ace-step-ui
Instalando o Motor (ACE-Step-1.5) e Configurando a Interface Seguindo as instruções que o próprio sistema nos deu, baixamos o motor de IA e depois executamos a configuração (setup.sh) dentro da pasta da interface:
./setup.sh
==================================
ACE-Step UI Setup
==================================
Found ACE-Step at: ../ACE-Step-1.5
Creating .env file...
Installing frontend dependencies...
added 199 packages, and audited 200 packages in 2s
28 packages are looking for funding
run `npm fund` for details
4 high severity vulnerabilities
To address all issues, run:
npm audit fix
Run `npm audit` for details.
Installing server dependencies...
added 186 packages, and audited 187 packages in 2s
28 packages are looking for funding
run `npm fund` for details
1 low severity vulnerability
To address all issues, run:
npm audit fix
Run `npm audit` for details.
Initializing database...
Migration script not found, skipping...
==================================
Setup Complete!
==================================
To start the application:
# Terminal 1 - Start backend
cd server && npm run dev
# Terminal 2 - Start frontend
npm run dev
Then open http://localhost:3000
Iniciando Todos os Serviços Agora que tanto o frontend quanto o backend estão instalados, basta indicar onde o motor (ACE-Step-1.5) está localizado e iniciar os serviços de uma só vez:
export ACESTEP_PATH=/path/to/ACE-Step-1.5
./start-all.sh
O sistema subirá os três componentes necessários (a API do modelo de IA, o servidor backend local e a interface frontend) simultaneamente:
==================================
ACE-Step Complete Startup
==================================
==================================
Starting All Services...
==================================
[1/3] Starting ACE-Step API server...
Waiting for API to initialize...
[2/3] Starting backend server...
Waiting for backend to start...
[3/3] Starting frontend...
==================================
All Services Running!
==================================
ACE-Step API: http://localhost:8001
Backend: http://localhost:3001
Frontend: http://localhost:3000
LAN Access: http://192.168.0.106:3000
Logs: ./logs/
PIDs:
API: 17328
Backend: 17382
Frontend: 17419
==================================
Opening browser...
Services are running in background.
To stop all services, run: ./stop-all.sh
Or press Ctrl+C and they will continue running.
E pronto! O seu navegador abrirá automaticamente em http://localhost:3000, revelando uma plataforma completa e totalmente sua.
É fascinante observar o quão rápido a comunidade de código aberto se move. Há pouco tempo, criar músicas a partir de texto com qualidade excepcional parecia exclusividade de grandes corporações. Hoje, com alguns comandos no terminal, qualquer pessoa com hardware compatível pode ter seu próprio gerador musical ilimitado. O futuro da criatividade não pertence apenas às grandes plataformas; ele está sendo construído, modificado e compartilhado livremente todos os dias.
Abaixo um vídeo do projeto em funcionamento.
Seedance 2.0: Viralizou no mundo, impressionou Musk e acendeu o alerta em Hollywood

A nova inteligência artificial de geração de vídeos da ByteDance, o Seedance 2.0, tornou-se um fenômeno na China e começou a repercutir globalmente após impressionar nomes como Elon Musk. Especializado na criação de vídeos cinematográficos a partir de poucos comandos, o modelo vem sendo comparado à ascensão meteórica da DeepSeek especialmente após o impacto global do modelo R1 no início de 2025.
Mas afinal, o que torna o Seedance 2.0 tão diferente e por que Hollywood está em alerta?
A próxima fronteira da IA: do texto ao cinema
Nos últimos anos, modelos focados em texto como o ChatGPT consolidaram a IA generativa no mainstream. O próprio R1 da DeepSeek reforçou o protagonismo chinês na corrida tecnológica.
Agora, o foco se desloca para modelos multimodais capazes de integrar texto, imagem, áudio e vídeo simultaneamente. É exatamente esse o posicionamento do Seedance 2.0.
Apresentado oficialmente em 12 de fevereiro, o modelo foi descrito pela ByteDance como uma solução voltada para:
- Produções cinematográficas profissionais
- Conteúdo para e-commerce
- Campanhas publicitárias
- Criação rápida de mídia social
A promessa é reduzir drasticamente os custos de produção audiovisual, permitindo que vídeos hiper-realistas de até 15 segundos sejam criados a partir de poucas linhas de instrução.
Comparações com a DeepSeek e o “momento Sputnik”
O sucesso do Seedance 2.0 acontece em um momento simbólico. Após o impacto global da DeepSeek, investidores e especialistas buscavam o “próximo salto” da IA chinesa.
O jornal estatal chinês Global Times comparou o impacto inicial do DeepSeek-R1 a um “momento Sputnik” referência histórica ao choque geopolítico causado pelo avanço soviético na corrida espacial.
Segundo editorial publicado na China, o sucesso contínuo do Seedance 2.0 estaria gerando uma nova onda de admiração tecnológica pela China no Vale do Silício.
O próprio Elon Musk reagiu a uma postagem elogiando o modelo em sua rede social X com a frase:
“Está acontecendo rápido.”
Uma declaração curta mas simbólica considerando o ritmo acelerado da corrida global por IA multimodal.
Viralização nas redes chinesas
Na plataforma Weibo, vídeos criados com o Seedance 2.0 acumulam milhões de visualizações.
Entre os exemplos que viralizaram:
- Ye (Kanye West) e Kim Kardashian como personagens de um drama palaciano na China Imperial, cantando em mandarim
- Cenas de luta entre Tom Cruise e Brad Pitt
- Confrontos fictícios entre John Wick e Neo (personagens de Keanu Reeves)
- Finais alternativos para séries como Stranger Things
Hashtags relacionadas ao Seedance 2.0 somaram dezenas de milhões de cliques, incluindo uma promovida pelo Beijing Daily com a frase:
“Da DeepSeek ao Seedance, a IA da China triunfou.”
O outro lado: Hollywood reage

Se por um lado a tecnologia empolga usuários e investidores, por outro ela acendeu um sinal vermelho na indústria cinematográfica americana.
A associação Motion Picture Association criticou duramente o lançamento, afirmando que o modelo teria feito uso não autorizado de obras protegidas por direitos autorais.
A Disney enviou notificação extrajudicial acusando a ByteDance de “apropriação virtual desenfreada” de propriedades como personagens da Marvel e de outras franquias do estúdio.
A Paramount Global também notificou a empresa por uso indevido de marcas como “South Park”, “Star Trek” e “O Poderoso Chefão”.
O sindicato dos atores de Hollywood classificou o uso de vozes e imagens sintéticas como “violação flagrante”, enquanto a Human Artistry Campaign chamou a plataforma de “um ataque a todos os criadores do mundo”.
A resposta da ByteDance
Em comunicado à BBC, a ByteDance afirmou:
- Que respeita os direitos de propriedade intelectual
- Que ouviu as preocupações da indústria
- Que está reforçando medidas de segurança
- Que busca impedir o uso não autorizado de IP por parte dos usuários
A empresa sinaliza que o Seedance 2.0 está em fase de testes apenas na China, mas a pressão internacional pode acelerar mudanças regulatórias ou mesmo disputas judiciais de grande escala.
O que está realmente em jogo?
O caso Seedance 2.0 expõe três grandes tensões globais:
Disrupção tecnológica
A capacidade de gerar cenas cinematográficas realistas com poucos comandos reduz barreiras de entrada na produção audiovisual.
Propriedade intelectual
Quem é responsável quando um modelo gera conteúdo baseado em IP protegido?
Geopolítica da IA
China e EUA disputam liderança não apenas em modelos de texto, mas agora em vídeo, multimodalidade e mídia sintética.
Conclusão
O Seedance 2.0 não é apenas mais um modelo de IA. Ele representa:
- Um avanço significativo na geração multimodal
- Um símbolo da aceleração tecnológica chinesa
- Um desafio direto às estruturas tradicionais da indústria criativa
- Um novo capítulo na corrida global por inteligência artificial
Se a DeepSeek provocou um “momento Sputnik” na IA textual, o Seedance 2.0 pode estar inaugurando o momento Hollywood da IA multimodal.
E como resumiu Elon Musk: “Está acontecendo rápido.”
A pergunta agora não é se a IA vai transformar o audiovisual —
mas quem controlará essa transformação.
Veja o teste do portal Assunto Nerd.

Fontes
https://sapo.pt/artigo/programa-de-video-seedance-2-0-tera-protocolos-de-seguranca-apos-ameacas-de-hollywood-6992dd046480661f46bab874
https://www.cnnbrasil.com.br/tecnologia/nova-ia-da-bytedance-viraliza-na-china-e-impressiona-musk-saiba-por-que/